Control of a swarm of untethered micro-robots
Magnetic untethered micro-robots can perform 3D navigation in various liquids under low-strength rotating magnetic fields by converting rotational motion to translational motion. They have been widely studied as carriers for targeted delivery and release of drugs and cells. For in vivo/in vitro therapeutic applications, control over individual groups of swimmers within a swarm is necessary for several biomedical applications such as drug delivery or small-scale surgery. In our lab, we perform selective control of individual microswimmers and swarm control of untethered micro-robots using various methods. For example:
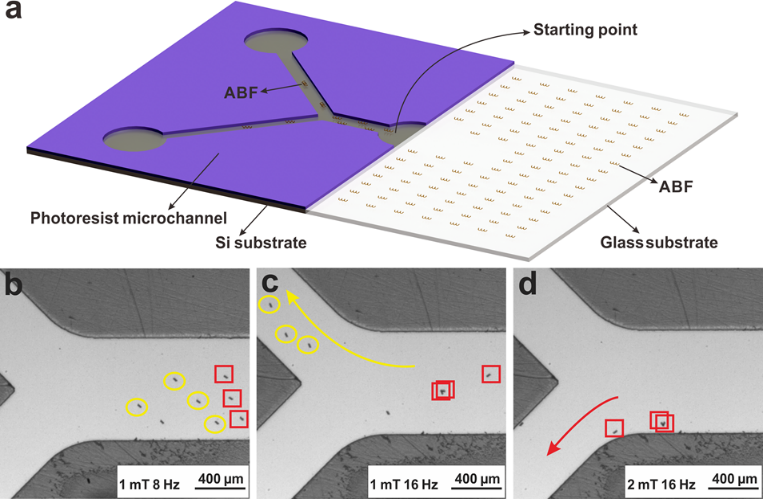
By modifying the surface properties and geometrical parameters of the microswimmers, we can alter the step-out frequency of a group of microswimmers within a swarm, which would allow a swarm of microrobots to be propelled to different destinations.
Contact: Xiaopu Wang
References:
Xiaopu Wang, Chengzhi Hu, Lukas Schurz, Carmela De Marco, Xiangzhong Chen, Salvador Pané, and Bradley J. Nelson. "Surface Chemistry-Mediated Control of Individual Magnetic Helical Microswimmers in a Swarm." ACS Nano 2018, 12, 6210.