Soft reconfigurable/shape-morphing microrobots
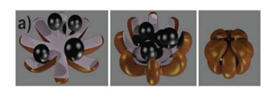
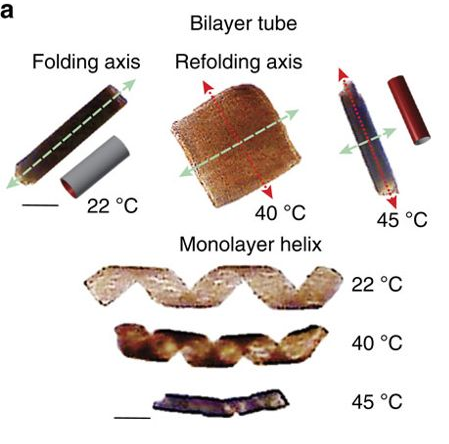
Nature has inspired the fabrication of many mobile micromachines used in minimally invasive biomedical applications. However, there are certain design and material limitations associated with these simple micromachines which effect their manoeuvrability in complex environments. In this project, we developed an origami-inspired rapid prototyping process for the fabrication of self-folding, magnetically powered micromachines with complex body plans, reconfigurable shape, and controllable motility. Selective reprogramming of the mechanical design and magnetic anisotropy of body parts dynamically modulates the swimming characteristics of the micromachines.
Contact: Tianyun Huang
References:
Huang, Hen-Wei, et al. "Soft micromachines with programmable motility and morphology." Nature communications 7 (2016): 12263.
Huang, Hen‐Wei, et al. "Investigation of Magnetotaxis of Reconfigurable Micro‐Origami Swimmers with Competitive and Cooperative Anisotropy." Advanced Functional Materials 28.36 (2018): 1802110.