Software development
We have acquired considerable experience in developing, building, and using MNS for applications that call for complex systems. These consist of modular hardware components for actuation and sensing, and a unified software framework which integrates the different components, providing reusable functionalities that can be shared across different applications.
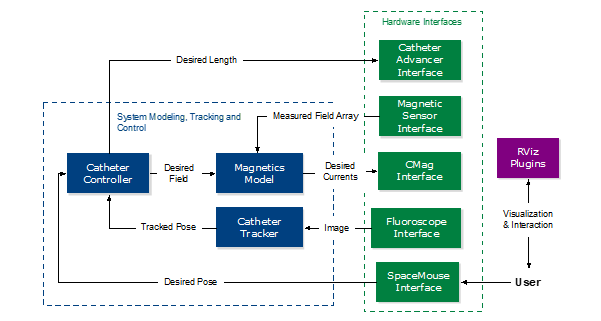
In recent years, the field of robotics research has widely adopted a common software framework called a Robot Operating System (ROS). At the MSRL, we have developed a software framework called Tesla, for our magnetic steering applications. Tesla leverages the ROS core functionalites such as concurrency, messaging, logging and visualization, and integrates external hardware and software through community-supplied packages. The functionalities of these systems are split into modules that can be combined to suit the requirements of the desired application. The following diagram shows an example of the various modules that are used when controlling a magnetic catheter for treating cardiac arrhythmias.